In pursuit of the fishbots at Yamamoto Lab
We ventured into Yamamoto Lab at Nagasaki University, which for the past 20 years has been developing biomimetic fish robots. Professor Ikuo Yamamoto’s marine-inspired mechatronics have won awards and set records.
Nagasaki, special report (words and images)
On a rainy afternoon, on the 6th floor of the Faculty of Engineering at Nagasaki University, a handful of high school students who won the privilege to visit the famous robotics laboratory of Professor Ikuo Yamamoto, fidget impatiently. They won’t be disappointed.
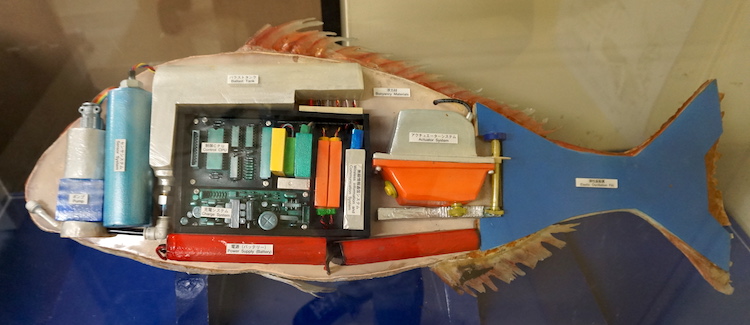
While Yamamoto Lab develops all sorts of robots (for space, medicine, aerial monitoring…), it is best known for its fish robots. No doubt because the first lifelike fishbot invented by Professor Yamamoto in 1995, a reddish sea bream that could pass unnoticed in an amusement park aquarium, continues to seduce the public today. And when the fishbot was made to swim alongside real fish in a previous experiment, the latter didn’t bat an eyelid.
Sea bream robot and friends at Yamamoto Lab (2016):
Since then, the professor and his small group of student researchers have developed several other biomimetic bots applying the same mechanism of the elastic oscillating fin: carp, shark, manta ray, dolphin, whale… The mechatronic concept is to propel the body using the vibrations of the fin. Yamamoto measures vibration frequency, swimming speed, length and width of the body to calculate a unique number attributed to each different fish.


“Fish are good teachers for underwater vehicles,” Yamamoto says. He applied the same biomimetic principle to the autonomous underwater vehicle Urashima that set the world record of 317 km continuous cruise on February 28, 2005. He believes that the elastic oscillating fin mechanism is far superior to the propeller—not only faster, but more energy efficient and safer at sea (especially as it doesn’t bother other fish). Depending on scientists and engineers, Yamamoto says, underwater vehicles could evolve to swim like fish with unique mechanisms for bigger propulsion within the next 10 years.
Merbot
In the meantime, he dreams of building a mermaid robot that can swim with a fishtail and manipulate equipment with human hands… similar perhaps to Stanford University’s thrusting marine humanoid Ocean One?

Professor Yamamoto pioneered the “multicopter” in Japan before drones became commonplace and invented a mini manta robot capable of navigating narrow spaces in zero gravity, which traveled into outer space with the Japanese astronaut Koichi Wakata in 2009. The roboticist still plans to make robots that fly like (augmented) birds.
“Observing animals for biomimicry only gives a hint,” Yamamoto explains. “Afterward, we think about how to reproduce movement based on engineering theory, by implementing dynamic connections and control systems. Manufacturing and logical thinking are based on engineering. We use biomimetic technology to rethink and invest new mechanisms from smart materials and smart structures, using mathematics and physics to analyze the dynamics.”

“This also applies to artificial intelligence—fish of the same school instinctively know how to coordinate with each other when swimming together. If we can learn from nature how to make such algorithms, we can optimize maneuvering systems in robotics.”
Yamamoto also believes that interaction with humans is a key point. As some of his students develop medical robots for performing surgery and rehabilitation, the professeur emphasizes the importance of a friendly user interface, especially when it comes to elderly care. It’s a recurring theme in Japan’s aging society, where 40% of the population is expected to be aged above 65 by the year 2050.

Unlike the military-oriented animatronics of Boston Dynamics, for example, Yamamoto Lab’s “soft robots” suggest a near future in which bots of all shapes, sizes and textures optimize and integrate our daily lives, with “natural” appearances, movements and intuitions.
More information on Yamamoto Lab